Desarrollo de robot manipulador móvil asistencial de bajo coste (MYRAbot)
Proyecto realizado en el
grupo de robótica de la
Universidad de León para la participación en la competición
RoCKIn.
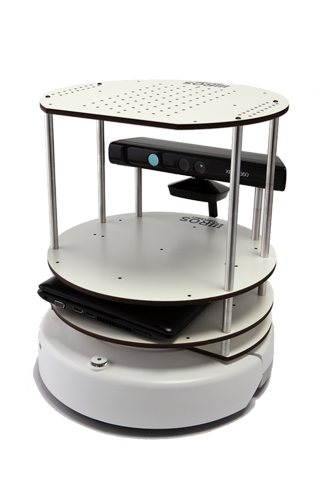
La plataforma robótica
MYRAbot se ha desarrollado usando el sistema abierto
ROS (Robot Operating System). Está compuesto por una estructura realizada en madera ensamblada mediante uniones por presión, una base móvil
create, sensores de ultrasonidos, una cámara
kinect, una cámara
xtion pro live y un brazo contruido usando un
kit bioloid.
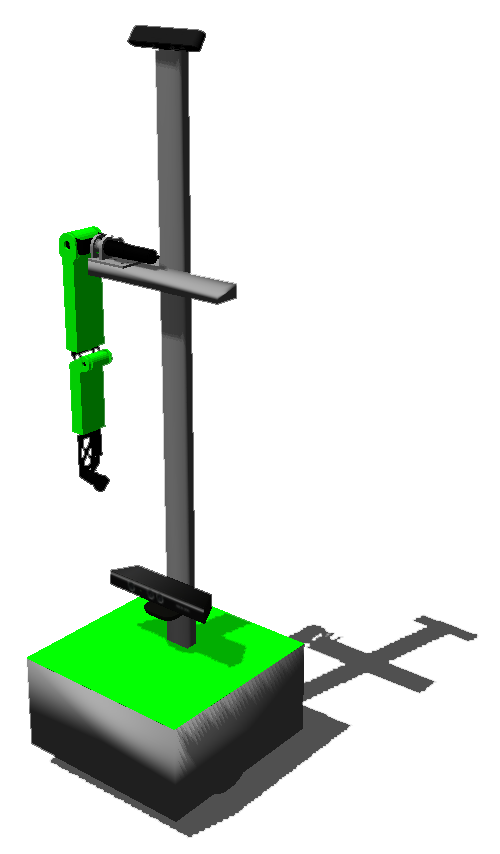
La aportación realizada a este proyecto ha sido la creación de las librerías y cinemáticas para el control del brazo en
ROS, usando como interfaz de comunicación entre PC y servomotores
Dynamixel un
arduino mega 2560. Así como la realización de los modelos del brazo y el robot para su simulación en
Gazebo, y varias aplicaciones de manipulación y teleoperación del robot.
 fernando@casadogarcia.es
fernando@casadogarcia.es (+34) 649 116 770
(+34) 649 116 770 CV en formato .pdf (ES)
CV en formato .pdf (ES)